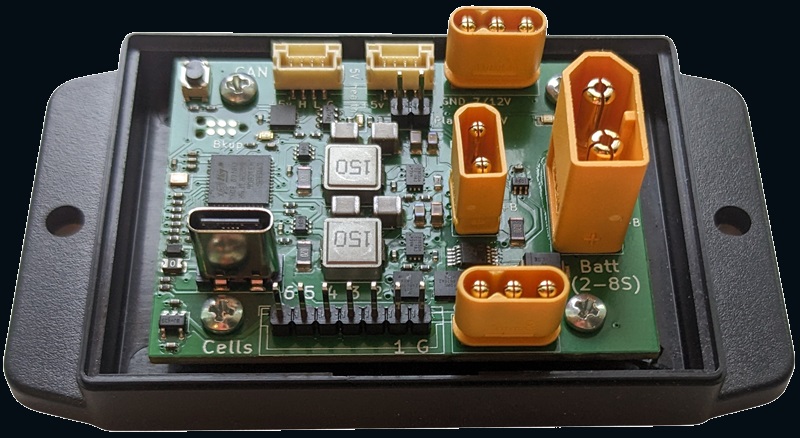
CAN Power module
With backup battery capability
Outputs 5V and 7.4V or 12V for servos and electronics
Display voltages and current over CAN
Backup battery to power servos and electronics
Current on 5V and 7.4/12V lines: 3A each
Up to 36V input (8S)
Data format: DroneCAN
Primary batt connection: XT-60
Backup batt connection: XT-30
5V outputs: MR-30 and JST-GH CAN
7.4V/12V output: MR-30
CAN capabilites: FD, up to 5Mb/s
Voltage and current measurements
This device outputs (over CAN) current on the backup battery and output lines. It outputs
voltage of these lines, as well as voltage of up to 6 individual battery cells. It does not
measure total battery current.
Dual output voltages, for flexibility
The 5V line is intended to power flight controllers and other CAN nodes, over the JST-GH 4-pin
DroneCAN connector. It can also power servos, using the MR-30 connection, which accomodates up to 3A.
The second output line can output either 7.4V or 12V, selected by a jumper. Thisline can be used to power
higher-voltage servos, or digital video transmitters, like from DJI and
HDZero. This line supports an additional 3A.
Battery backup
Supports an optional backup battery, using an XT-30 connection. If the primary battery
is disconnected, or runs out of power, the backup immediately takes over, powering electronics and servos.
This allows for motor-out recovery of fixed-wing aircraft, and maintaining a radio link and camera output for
vehicles that run out of main-battery life for any reason.
Plug and play with ArduPilot and PX4
Easy setup; uses standard DroneCAN messages for compatibility with the most popular flight controllers. Includes
a mounting stand.
CAN-FD ready
Supports up to 64-byte frames, and 5Mbps data rates. It's also compatible with classic CAN systems.
CAN allows for simplified wiring, and robust, interference-resistant connections.
The bare PCB is easy to remove and mount; this is useful for compact builds.
Easy configuration
Data broadcast rate and number of channels are customizable, using the AnyLeaf Preflight software that connects with USB,
or through DroneCAN's parameter standard. Preflight is lightweight and easy to use: Download, launch, and plug the device
into your PC's USB port.

Our firmware and preflight software are written in Rust, for maximum reliability.
Sends the following messages:
- DroneCAN circuit status
- DroneCAN power supply status
- A custom, simple, byte-aligned format describe in the datasheet below
Perfect for commercial solutions and university projects
- Connect the device to your CAN system using the 4-pin DroneCAN cononector.
- If your flight controller is already configured for CAN, you're done
- If your flight controller isn't yet configured, open Mission Planner, and adjust these settings
under Config, Full Parameter List:
- CAN_P1_DRIVER = 1
- BATT_MONITORx = 8
Quickstart with PX4
- Connect the device to your CAN system using the 4-pin DroneCAN cononector.
- Set the UAVCAN_ENABLE parameter to a non-0 value.
Specifications:
- Module dimensions: 69 × 49 × 17 mm. 92mm width with tabs
- Mounting holes: 2 × M4, spaced 80mm
- Weight: 48 grams
- Power input: 5 – 36V, via XT-60, XT-30, or USB.
- Maximum input battery voltage: 36V (8S)
- Maximum backup battery voltage: 26V (6S)
- Maximum individual cell voltage: 4.5V
- Power output 1: 5V, via 2xJST-GH CAN connectors, or MR-30. 1 amp each. (Shared with MR30)
- Power output 2: 7.4V or 12V, via an MR-30 connector. 3 amps. (Shared with GH)
- Power output selection: 2-pin jumper, with 2.54mm spacing.
- MCU: STM32G431. 170Mhz Cortex-M4
- CAN tranceiver: NXP TJA1051TK/3
- CAN datarate: Configurable up to 5Mbps
- CAN frame size: 8 or 64-byte
- CAN connections: 2 × JST GH
- Protocol support: DroneCAN